Digital Map
Concept:
- For realizing functions such as on-board localization, generating movement authorities, etc., onboard and trackside systems rely on map data. Hence there is a need to provide a standardized interface that can provide the required map data to various systems for a CCS architecture. This includes map management functions and map structure.
Scope of the Cluster:
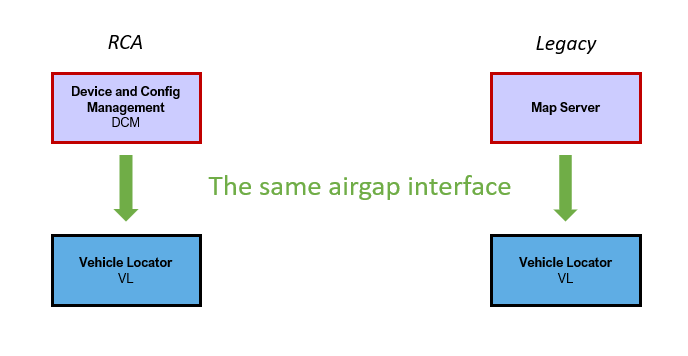
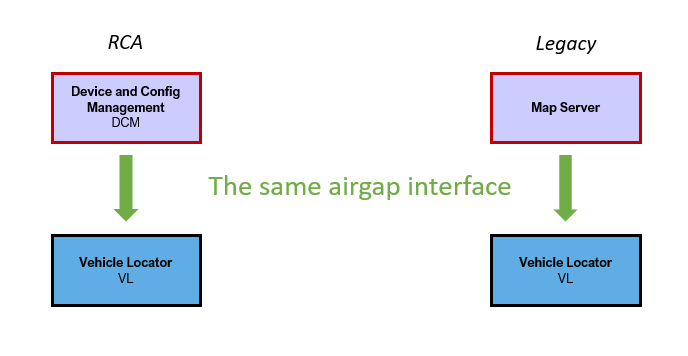
- The cluster aims to define the architecture of digital map (static data) e.g. for safety-relevant function. The data will be transmitted over the airgap from trackside to onboard. This will work both both legacy and future railway architectures.
{kind=link}
- To achieve this characteristics of elements and models added to the digital map must be defined. This is to ensure the map data can be utilized between various RCA systems. Map data may include but is not limited to:
- Track axis: incl. radius, gradient, superelevation.
- Topology: logical node edge model.
- Elements: e.g. Balises, Tunnels, etc.
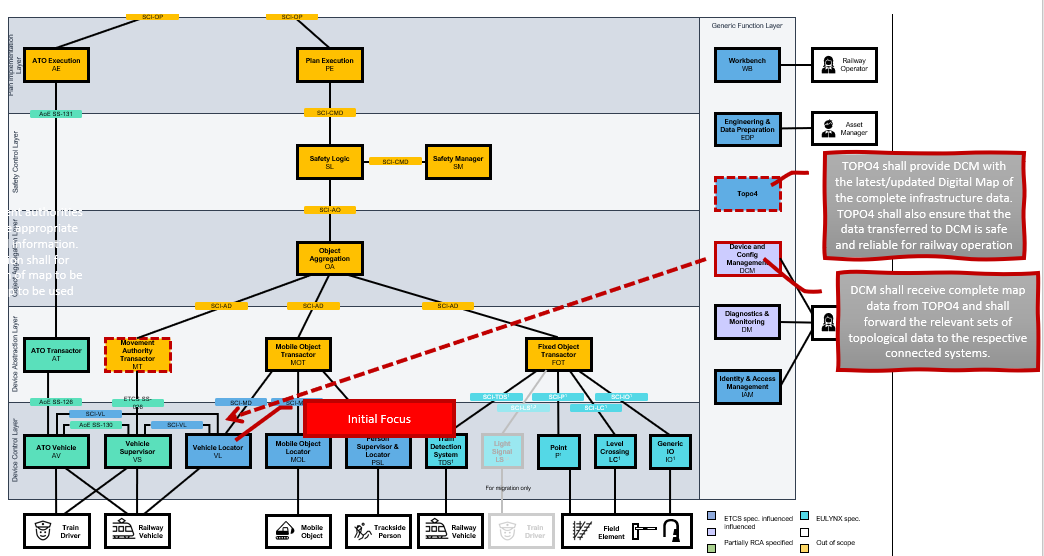
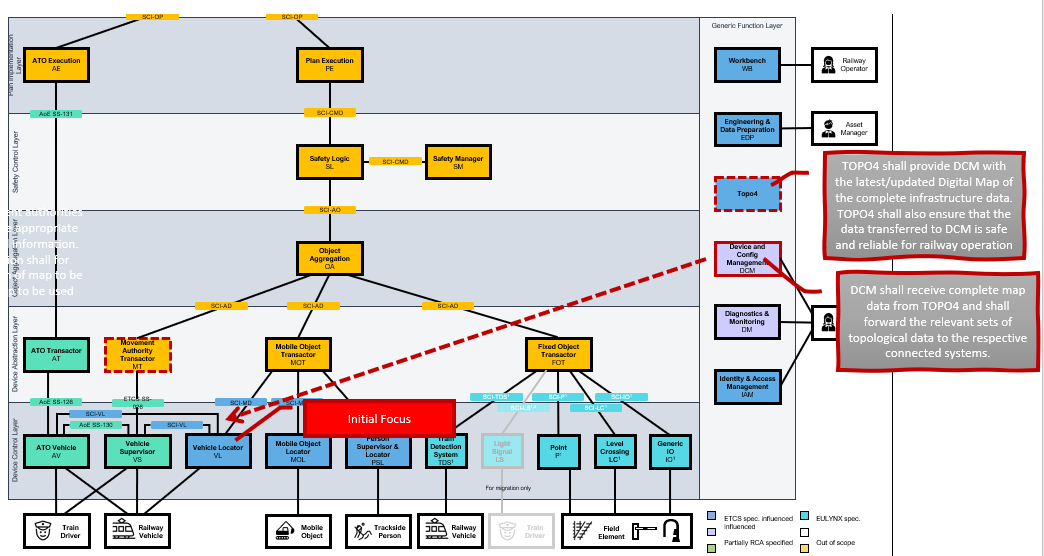
- Consequently initial focus lies on support of on-board localisation for components such as vehicle locator.
- Once this has been achieved future expansion towards other safety and non-safety related functions should be considered.
{kind=link}
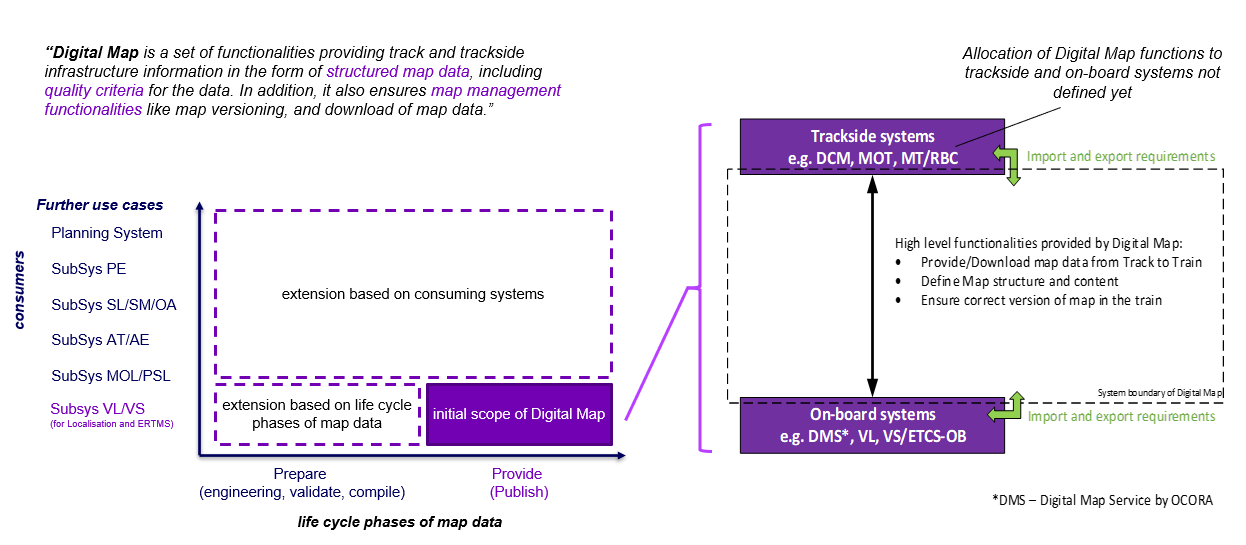
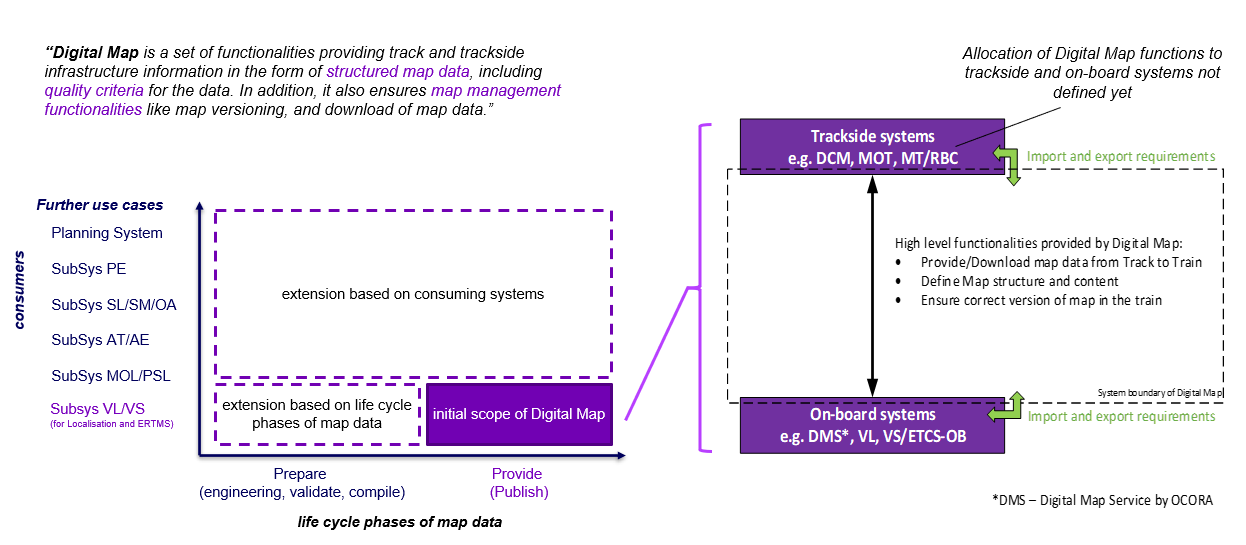
- Below Figure depicts possible use cases for map data by various systems within the architecture:
{kind=link}
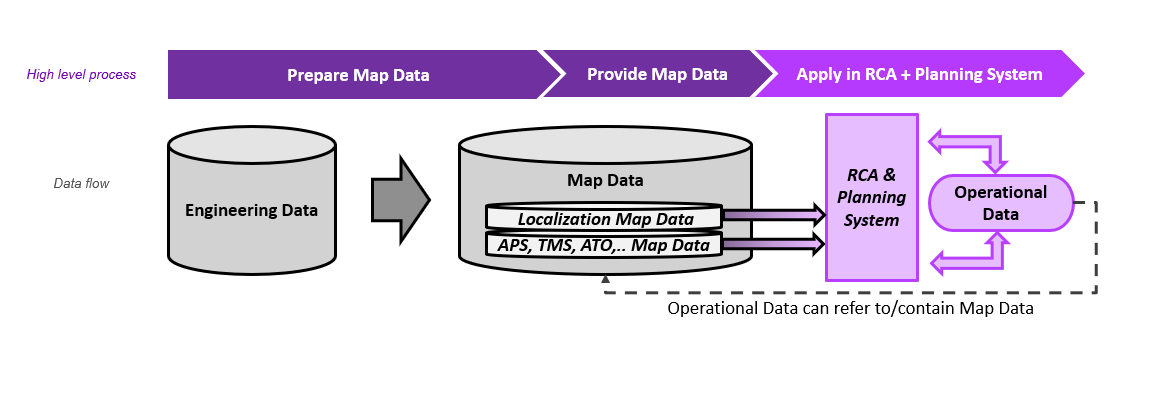
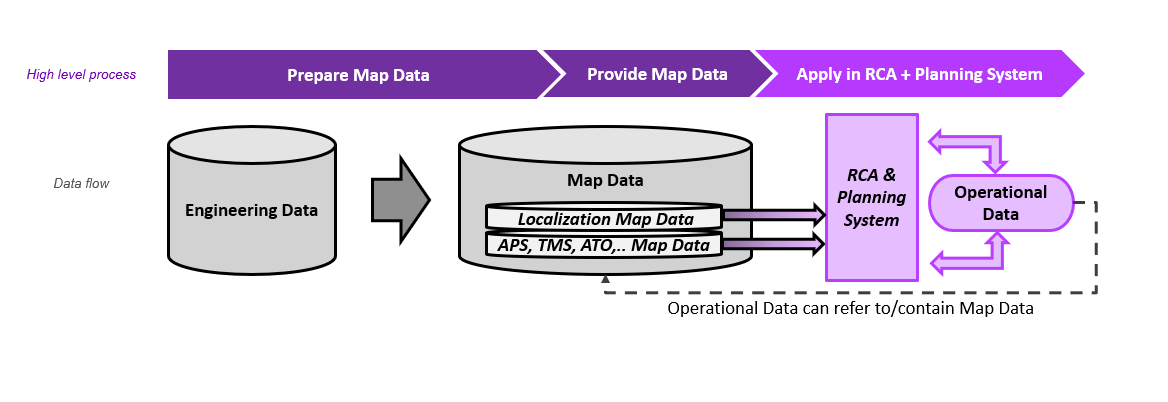
- Below figure shows the high level of preparing and providing map data to the RCA systems.
- The preparation stage involves using engineering data which includes data related to the engineering process of the IM as per the requirements of the map data. Subsequently the latter is then used by the various systems of the RCA.
{kind=link}
Useful Documents/Deliverables:
To go back please click here